垂直起降固定翼无人机
智能导航解决方案
融合高性能飞控与智能视觉导航技术,为未知复杂环境提供自主、安全、高效的无人机飞行解决方案
融合高性能飞控与智能视觉导航技术,为未知复杂环境提供自主、安全、高效的无人机飞行解决方案
两大核心产品协同工作,打造从飞行控制到智能导航的完整解决方案
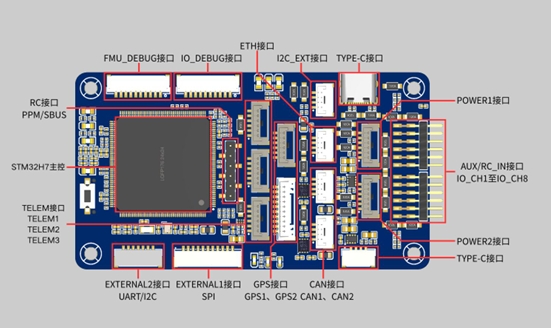
针对垂直起降固定翼飞行器优化的通用型控制器,具备高性能计算能力和高稳定性设计,满足专业级飞行需求。
STM32H753系列,7MHz Arm® Cortex-M7内核,2MB闪存+1MB RAM
独立总线的多冗余IMU及气压计,传感器故障时无缝热切换
独立电源控制,板载加热电阻确保IMU处于最佳工作温度
基于视觉感知的实时轨迹规划框架,为无人机在未知复杂环境中提供自主导航能力,适用于各类复杂任务场景。
Intel NUC 11v5,Core i5-1145G7处理器,16GB内存+250GB SSD
Intel RealSense D435i,1280×720深度分辨率,0.2m-10m探测范围
Holybro PX4 V5飞控,完整传感器融合,支持MAVLINK协议
硬件与软件深度融合,构建稳定可靠、智能高效的无人机导航系统
Intel RealSense D435i
深度分辨率: 1280×720@30fps
RGB分辨率: 1920×1080@30fps
深度范围: 0.2m-10m
Intel NUC 11v5
处理器: i5-1145G7 (4核8线程)
内存: 16GB DDR4 3200MHz
存储: 250GB SSD
Holybro PX4 V5
处理器: STM32F765 (216MHz)
传感器: ICM-20689 IMU等
支持: MAVLINK协议
USB 3.0连接,通过librealsense2 SDK处理深度数据
UART串口连接,波特率921600,MAVROS作为通信桥梁
FlightStateMachine
VisNavPlanner
SplineOptimizer
TrajectoryTracker
VoxelMapper
TrajectoryVisualizer
激光/深度相机等
目标点/任务指令
p_i为控制点,B_{i,k}(t)为k阶B样条基函数
平衡平滑性、安全性、动力学可行性三大目标
全方位保障无人机在复杂环境中的自主、安全、高效飞行
基于梯度优化策略生成平滑、安全且动力学可行的轨迹,适应室内外各类复杂环境。
基于信息增益的主动探索策略,实现未知环境快速建图,无需预先知道环境信息。
风险感知规划与紧急避险机制,毫秒级响应突发障碍物,主动规避高风险区域。
将目标识别与轨迹规划深度融合,在复杂环境中精准定位并追踪目标对象。
实时监测环境变化,当遇到突发障碍或环境改变时,快速生成新的可行轨迹。
考虑电池状态和能耗模型,优化飞行路径,确保任务完成前能够安全返航。
负责管理系统整体行为,处理各种飞行状态转换,确保系统稳定运行。
构建和维护环境的三维表示,为轨迹规划提供精准的环境信息。
系统核心组件,负责轨迹的生成与管理,确保飞行路径最优。
执行基于梯度下降的轨迹优化,平衡各项性能指标。
适用于室内外各类复杂环境,为不同行业提供专业级无人机解决方案

在厂房、隧道、矿井等狭窄封闭空间实现自主飞行,无需人工操控

在森林、城市废墟等复杂障碍物环境中灵活避障,完成探索任务

应对突发障碍物,毫秒级响应并重新规划安全飞行路径

用于灾害现场搜救、电力巡检、油气管道检测等专业任务场景

对古建筑进行精细化扫描建模,保护文化遗产,辅助修复工作

支持多无人机协同工作,提高大面积作业效率和覆盖范围
引领无人机智能导航技术发展,多项核心创新打造差异化竞争优势
基于信息增益的主动探索策略,实现未知环境快速建图。将目标识别与轨迹规划深度融合,在复杂环境中精准追踪目标。
考虑环境不确定性,主动规避高风险区域。毫秒级检测并响应突发障碍物,支持垂直规避等多种避障方式。
创新性地将电池状态和能耗模型融入路径规划,确保任务完成前安全返航,提升任务可靠性。
硬件层面采用多冗余设计,传感器故障时无缝热切换,配合独立电源控制和温度管理,确保系统稳定运行。