群集式无人航行器解决方案
融合联邦学习与群集协作技术,提供全方位、智能化的沿海污染治理服务
四大核心功能模块
智能监测与识别
集成声纳、视觉传感器和水质监测设备,实时检测水面及海底垃圾,识别污染物类型和浓度。
高效清理与收集
模块化垃圾收集设计,可互换网具和垃圾桶,群集协作拖曳重载,实现各类垃圾高效清理。
联邦学习云脑调度
基于联邦学习的智能调度系统,规划最优路线和编队,持续优化检测和路由模型。
数据监测与报告
实时采集和分析水质数据,生成详细报告,为环保决策提供数据支持。
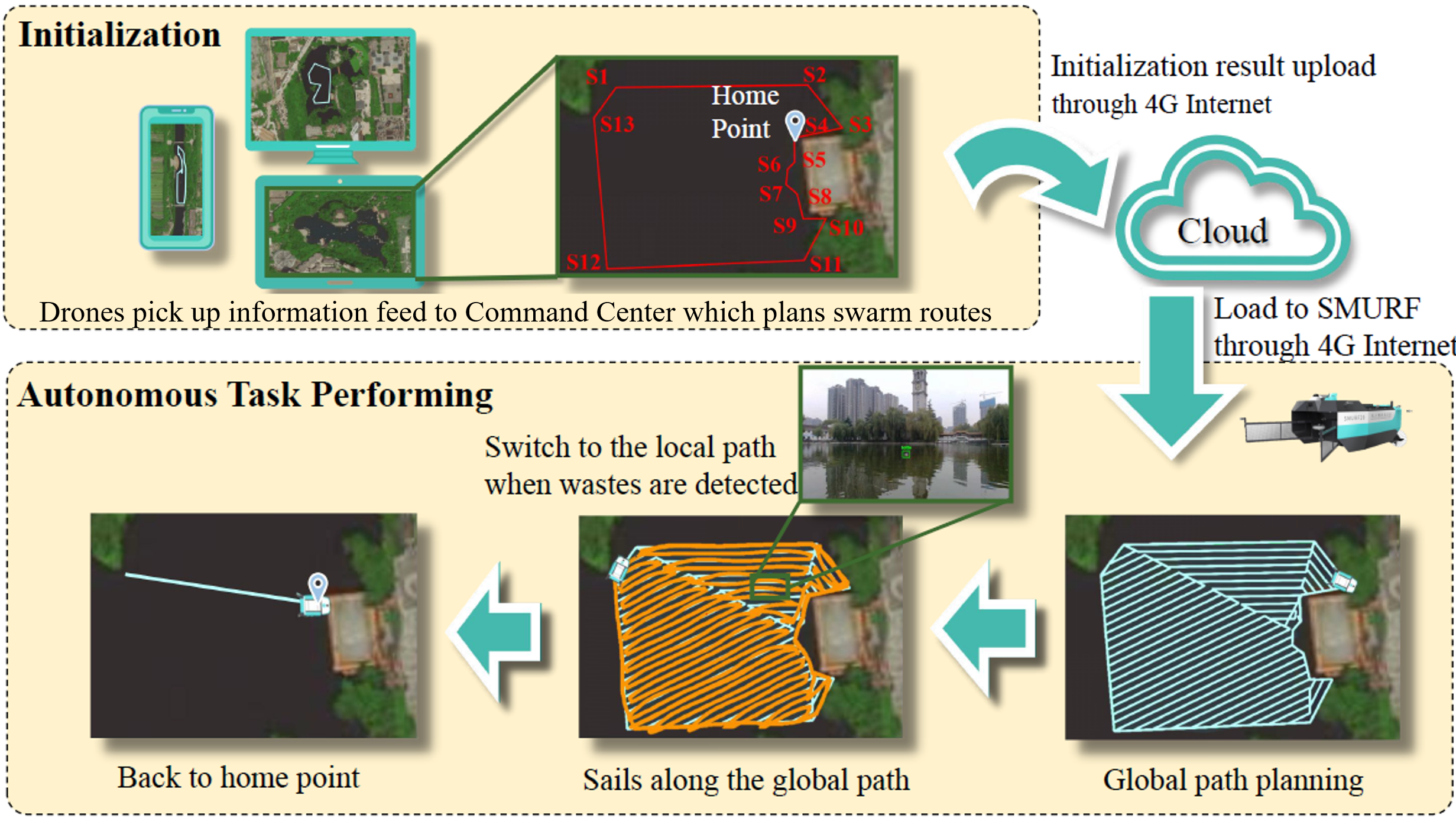
智能治理工作流程
1
区域监测与规划
通过无人机和卫星数据进行区域污染状况评估,联邦学习云脑规划最优清理路线和航行器部署方案。
2
群集航行器部署
根据污染情况部署浅水型和海洋型无人航行器,形成群集协作网络,开始24/7不间断作业。
3
智能清理与收集
航行器群集协作,利用模块化收集设备清理各类垃圾,声纳系统检测海底垃圾并标记位置。
4
数据采集与分析
实时采集水质数据、垃圾种类和数量信息,通过联邦学习算法持续优化清理效率和路径规划。
5
垃圾回收与报告
定期回收航行器收集的垃圾,进行分类处理。生成详细的污染治理报告,为后续工作提供参考。